
网站二维码

微信二维码
网站二维码
微信二维码
联系人:邓先生
手机:18620259190
邮箱:hy1022@epion.cn
地址:广东省广州市黄埔區(qū)九佛街(jiē)道联浦街(jiē)2号(知识城联东数字谷U1栋4楼)
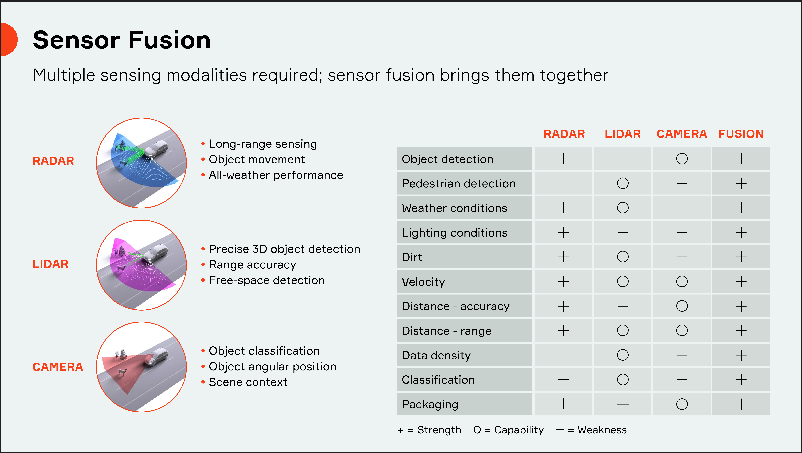
传感器融合是将来自多(duō)个雷达,激光雷达和摄像机的输入汇集在一起以形成車(chē)辆周围环境的单个模型或图像的能(néng)力。生成的模型更加精确,因為(wèi)它可(kě)以平衡不同传感器的强度。車(chē)辆系统然后可(kě)以使用(yòng)通过传感器融合提供的信息来支持更智能(néng)的动作。
每种传感器类型或“模态”都有(yǒu)其固有(yǒu)的优点和缺点。雷达即使在恶劣的天气条件下也能(néng)准确确定距离和速度,但非常强大,但无法读取路牌或“看到”交通信号灯的颜色。相机可(kě)以很(hěn)好地读取标志(zhì)或对物(wù)體(tǐ)进行分(fēn)类,例如行人,骑自行車(chē)的人或其他(tā)車(chē)辆。但是,它们很(hěn)容易被灰尘,阳光,雨水,雪(xuě)或黑暗所蒙蔽。激光雷达可(kě)以准确地检测物(wù)體(tǐ),但是它们没有(yǒu)相机或雷达的承受能(néng)力或承受能(néng)力。
传感器融合使用(yòng)软件算法将来自每种传感器类型的数据汇总在一起,以提供最全面,因此最准确的环境模型。它还可(kě)以通过称為(wèi)内部和外部传感器融合的过程来关联从机舱内部提取的数据。
車(chē)辆也可(kě)以使用(yòng)传感器融合来融合来自相同类型的多(duō)个传感器(例如,雷达)的信息。通过利用(yòng)部分(fēn)重叠的视场,可(kě)以提高感知度。当多(duō)个雷达观察車(chē)辆周围的环境时,一个以上的传感器将同时检测物(wù)體(tǐ)。通过全球360°感知软件进行解释,可(kě)以将来自多(duō)个传感器的检测进行重叠或融合,从而提高車(chē)辆周围物(wù)體(tǐ)的检测概率和可(kě)靠性,并能(néng)更准确,更可(kě)靠地表示环境。
低级传感器融合
当然,車(chē)辆上的传感器越多(duō),融合就越具有(yǒu)挑战性,但也存在着更多(duō)提高性能(néng)的机会。為(wèi)了利用(yòng)这些好处,Aptiv使用(yòng)了一种称為(wèi)低级传感器融合的技术。
过去,用(yòng)于分(fēn)析传感器数据以确定和跟踪对象的处理(lǐ)能(néng)力已与摄像机或雷达包装在一起。借助Aptiv的Satellite體(tǐ)系结构方法,处理(lǐ)能(néng)力集中在功能(néng)更强大的主动安全域控制器中,从而可(kě)以从每个传感器收集低级传感器数据并将其融合到域控制器中。
将处理(lǐ)移至域控制器后,传感器将占用(yòng)更少的體(tǐ)积和更少的质量-减少多(duō)达30%。為(wèi)了进行比较,摄像机的占地面积从一副扑克牌的大小(xiǎo)减少到一包口香糖的大小(xiǎo)。通过使传感器尽可(kě)能(néng)小(xiǎo),OEM可(kě)以在車(chē)辆包装中提供更多(duō)选择。
另一个好处是增加了数据共享。在传统系统中,智能(néng)传感器会独立处理(lǐ)环境输入,这意味着使用(yòng)信息时做出的任何决定都只能(néng)与单个传感器所看到的一样好。但是,在卫星架构中,所有(yǒu)来自传感器的数据都被集中共享,因此域控制器中的主动安全应用(yòng)程序有(yǒu)更多(duō)机会利用(yòng)它。Aptiv甚至可(kě)以应用(yòng)人工智能(néng)(AI)工具来提取有(yǒu)用(yòng)的信息,否则这些信息将被丢弃。正确的AI可(kě)以从中學(xué)到东西,这可(kě)以帮助我们解决客户面临的挑战性极端情况。
低级别传感器融合的第三个好处是减少了等待时间。域控制器不必等待传感器处理(lǐ)数据再对其进行操作。在偶数秒(miǎo)的情况下,这可(kě)以帮助提高性能(néng)。
更多(duō)数据将导致更好的决策。通过采用(yòng)允许使用(yòng)大量传感器的車(chē)辆架构,然后通过传感器融合来合成数据,車(chē)辆可(kě)以变得更智能(néng),更快。

